— Work in Progress —
Locomotor:
A Hybrid Human-Machine System

The area of human-machine choreography is yet to be extensively explored. How body structure can be extended through machine mechanisms points to how the body can perform beyond its biological form and functions as well as beyond the local space it inhabits. How human movement is transduced into machine motion and then can be both expressed and extended into virtual performance on the web promises new possibilities in both conceptual approach and aesthetic application. For example, incorporating virtual camera views of the performing human-machine system enriches the choreography and intensifies the artistic result.
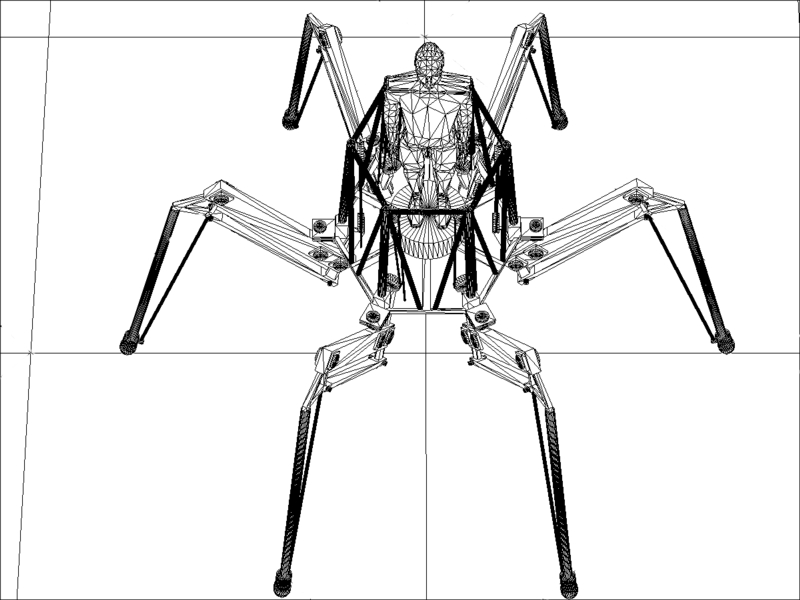
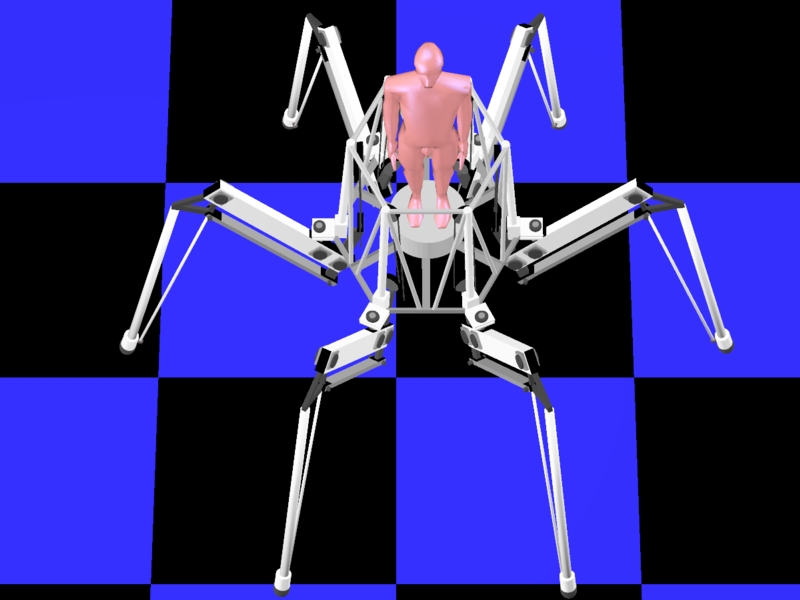
This work-in-progress statement describes Locomotor, a hybrid human-robot walking machine. The uniqueness of the design can be seen in several features:
- Locomotor is autonomous. It is not tethered or powered externally. All its power supply is onboard, allowing a maneuverability not possible with previous walking machines.
- It is a flexible and compliant mechanism. The locomotion is the result of the operator/artist/dancer shifting his or her body weight and twisting his or her torso to actuate the walking motion and to direct its movement. For example, the robot walks in the direction that the body faces. This system results in a much more intuitive and direct actuation of the machine legs.
- The robot looks like an insect but walks more like a dog. It is not a passive walker, but uses the intrinsic dynamics of its mechanism.
Thus Locomotor is a valuable artistic tool to explore hybrid human-machine systems. It is the product of an interdisciplinary project combining art, dance, engineering and evolutionary and adaptive systems. Human bipedal gait is translated into an insect-like machine motion. The body's small actions are amplified by the 5:1 pantagraphic structure of the machine legs. The robot scales up not only the apprearance of the body but also its relatively small motions. The robot legs effectively become the extensions of the operator. The body becomes literally the body of the machine.

The project is in part a response to interest in how behaviour arises. In examining ants, spiders and other insects, there is a realization that the complexity of their behaviour is the manifestation of the complexity of their environment. We want to construct body performance as not so much agency-driven, but rather the result of the complexity of the body's natural and artificial environment, i.e., of its language and its social and cultural influences. The intent is to construct, experience and articulate extended operational systems.
The intention of Locomotor is:
- To further explore art and dance performance possibilites in intuitive, flexible, creative and compliant ways. Locomotor is a robot especially constructed as a hybrid human-machine system.
- To experiment with virtual and Virtual Reality Markup Language (VRML) interfaces with the physical robot for interactive web performance and to extend audience participation.
- To explore the sound potential presented not only by amplifying the machine sounds (pneumatic and mechanical) but also using proximity, touch and light sensors. The intent is to make the machine more sound responsive to its performance environment and to map sounds to movements.
- To exploit the autonomous nature of the robot and perform in spaces outside galleries. The robot is not tethered and much more maneuverable than the previous exoskeleton walking machine.
The Locomotor project team comprises researchers and artists from Nottingham Trent University and Sussex University who are involved in the exploration of art, dance, body and machine mechanics. The project is coordinated by Prof. Barry Smith (Director of the Live Arts Archive), Prof. Inman Harvey (Evolutionary and Adaptive Systems Group), Prof. Sophia Lycouris (dancer and choreographer) and myself (performance artist).
The first performances will be as part of the NOW Festival in Nottingham on 30 November and 1 December, 2001.
About the Author
Stelarc is an Australian artist who has performed extensively in Japan, Europe and the United States – including new music, dance festivals and experimental theatre. He has used medical instruments, prosthetics, robotics, virtual reality systems and the Internet to explore alternate, intimate and involuntary interfaces with the body. He is currently Principal Research Fellow in the Performance Arts Digital Research Unit at the Nottingham Trent University, UK.